In the previous exercise we conducted a distance azimuth exercise, which is a very useful and effective fieldwork technique, but sometimes a higher level of accuracy is necessary or elevation points need to be collected also. In this case, it would be more appropriate to use a total station. A total station is an electronic device used in modern day surveying, it contains an electronic distance meter, and if combined with a GPS unit, location, distance and elevation methods can be taken and recorded. This assignment required us to learn how to set up the station and how to use it alongside the other equipment as, we were to use the open space int he middle of campus to collect data for fifty points using the unit and a sighting pole to make our points. This data could then be uploaded on to a computer and displayed using ArcMap.
The Study Area
The area we were suing to collect our points is know as the campus mall and is about the size of a two hectare plot, the land is a mixture of green space and paving, with a small creek running through it, as a result it lies on a slight slope. Unfortunately I can not show a aerial image of the site, as the last images were taken prior to the area being exposed the way it is today. We were to only study in one hectare plot within this area.
Methods
First of all we started in class by learning to set up the station and the associated tripod. This involved making sure it was set to a height that would be comfortable for our group members to have to be looking through constantly. We then had to attach the unit to the the tripod using the safety screw, and ensure the knobs were pointing away from us to make sure we were going to be bale to take measurements. We had to then look at the spirit level built within the unit, to make sure that the legs of the tripod were all at an equal height, and adjust them accordingly. Then we had t make sure that the unit was level, this was done by turning 3 separate dials on the corners of the unit, with the dial facing towards you, until the display bubble was withing the display circle. An example of a total station unit is shown in figure 1 below.

Figure 1: A total station unit like the one we used during our fieldwork to gather data on point'd distances and elevation.
When we were out in the field gathering our data these same processes outlined above were carried out, and is shown in figure 2. We had to use the same azimuth instrument as in the previous exercise to calculate the one hectare plot we would be working in. Then then we had to ensure the Bluetooth was active on the unit in order to sync with the GPS unit to gather the location of points and their associated data. Then the GPS unit, was switched on, the Bluetooth option turned on and we made sure it was synced with the total station. Then on the GPS unit, a new project for our group was created and we selected the appropriate co-ordinate system was selected, we choose NAD 1983 UTM Zone 15N, for the state of Wisconsin. Then we had to enter the height of the sighting pole (in our case 2 meters), the occupied point which could be read off the display on the total station screen, and the back sight point which we had to collect. This was done by one member of the group selecting and marking with a coloured flag a point and standing there with the total station. Another member of the group then looked through the lens of the total station and lined up the target on the lens with the center of the upper circle of the sighting pole. Example of sighting poles for use with a total station are shown below in figure 3. The reading of this distance was shown on the station's screen and was entered in to the GPS data.

Figure 2: An image of the total station and tripod put together and being used to find the sighting pole where the photo is taken from.

Figure 3: Examples of sighting poles used in the collection of data with a total station, you can see the black lever which can be sued to adjust the height of the pole, and the central circle on the panel which is used to line up with the station's lens.
This point is sort of a back up point if you were to have to move your unit. So, the actuall collection of points was done in rather the same matter. Except that now with the GPS linked with the station the measurements would go straight o to the GPS unit. So one member of the group moved around trying to capture the whole scope of the topography of the area as the other lined the station up and waited for the total station to register and transfer the measurements to the GPS units. No flags needed to be placed at these points as we would not need to return to them. For our group we tried to cover the areas in front of and either side of the unit, and go down a bit further in to the creek bank.
Once we had the desired number of points we were ready to deconstruct our equipment and transfer our data on to the computer. This involved connecting the GPS device to the computer through the use of a GPS cable. The data then appeared as an x,y table on the computer so we had to make sure we added a z field for elevation and the table was imported in to Arc Map and a base ma could be added to give the points some relation. The points could also be taken to create a 3D surface using whichever interpolation technique worked best.
Discussion
The assignment took a lot of set up and figuring out what to so at the beginning, and we ad run out of time during class to go through every group and show them what to do, so it was quite confusing. The first time we attempted to do it, there were very rainy conditions and the equipment ended up becoming too wet and so we had to abandon our fieldwork. So this could be seen as one disadvantage over the more traditional method which would have still worked during the rain as long as visibility was not impaired.
When we did mange to complete our fieldwork we had some trouble with the Bluetooth on the total station working as some how it had a code programmed in to it which was not necessary, so we had to seek some assistance with figuring that out and why it wouldn't connect. There were also some points where the GPS would loose connection and quit out of the point recording, but after a while and keeping the GPS as close as possible, this stopped. This would have been easier if we had three people as we were meant to to have one person working the total station, one with the sighting pole and one with the GPS unit. The person that was holding the sighting pole had to make sure they held it straight upright, so that the station could collect an accurate measurement. The day we did eventually complete our fieldwork the weather was unusually nice and there were many people in the area we were surveying, decreasing slightly the areas we were able to take measurements from.
In figures 4 and 5 below, we can see to IDW interpolation 3D models that were created from points gathered during the fieldwork, we can see how they contain similarities and differences to each other. It is difficult to explain without having previously been able to show you an image of the study are, but both capture the small creek that was talked about. This is located to the East of the area, my group seemed to capture that valley side to the South, wheres as the other group captured more of the full extent of the creek;s course. Overall the other groups data seems to be more continuous, whereas ours seems slightly edgier, this may be due to the fact that we had so many people in the area that we could not follow a strict sampling method, and perhaps covered some areas better than others. Both capture the general trend of going down in relief as you move further North, with the total station being situated on the area of slightly higher relief.
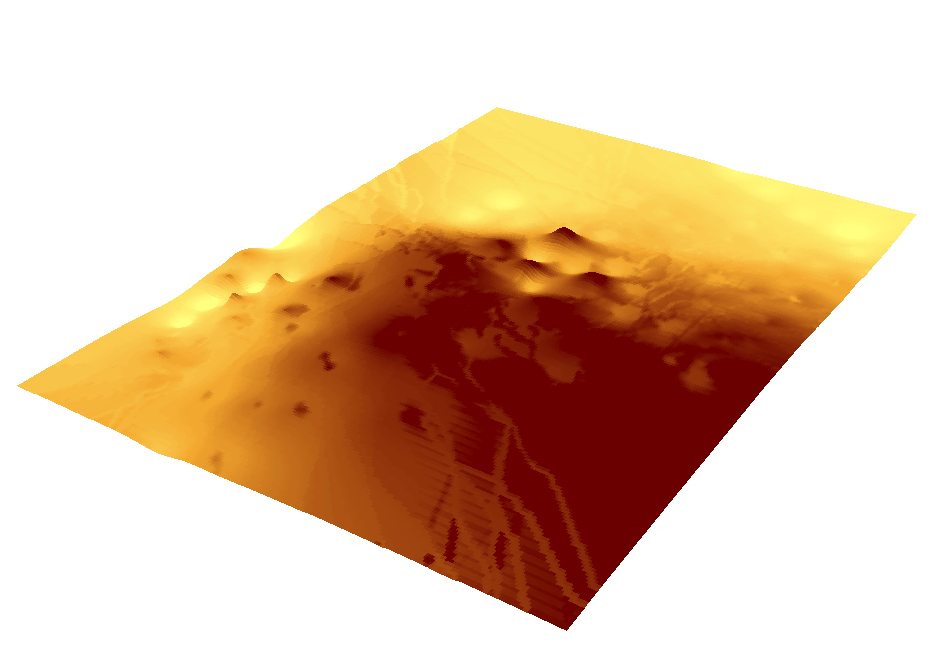
Figure 4: An Inverse Distance Weighted (IDW) Interpolation model of the area my group surveyed.

Figure 5: An Inverse Distance Weighted (IDW) Interpolation model of another groups data that they collected in the same study area.
Conclusions
Using a total station can collect a wider range of data but takes a lot of set up and good weather conditions. Once you have all the elements set up and the equipment set up, you can gather the points fairly efficiently. But it does rely on the sighting pole being straight and balanced at every point so that all the measurements are comparable to each other. The results gathered form such a form of data collection will gather different results for different people depending on your sampling method and the conditions you are carrying out the fieldwork in. However, all results should manage to map out the general relief of an area as well as the size and fairly accurately represent the real world phenomena.






















